|
|
Jeudi 3 Juillet 2025. |

Le multiplexage
Depuis le début des années quatre-vingt, de nombreux systèmes électroniques ont fait leur apparition dans le domaine de l'automobile, selon trois grandes étapes successives :
� l'époque où chaque système était totalement indépendant des autres;
� la seconde période, pendant laquelle quelques systèmes commençaient à communiquer entre eux;
� enfin, la dernière époque où tout le monde doit communiquer avec tout le monde, et ce en temps réel.
Début 1981, quelques grandes sociétés automobiles s'intéressèrent à des systèmes de communication fonctionnant en temps réel entre différents microcontrôleurs, concernant notamment le contrôle moteur, la transmission automatique et l'anti-patinage.
En 1983, le leader allemand d'équipements automobile Robert Bosch Gmbh pris la décision de développer un protocole de communication orienté vers des systèmes distribués fonctionnant en temps réel et satisfaisant à toutes ses propres exigences.
En 1985, le géant américain Intel, puis Philips et Siemens se lancent dans la fabrication de circuits intégrés. Depuis, d'autres fabricants leur ont emboîté le pas (Motorola, National Semiconductors, Texas Instruments, MHS, etc.)
Au printemps 1986, la première communication concernant le bus CAN fût réalisée.
Enfin, au milieu de l'année 1987, la réalité prit la forme des premiers siliciums fonctionnels ; puis, en 1991, une première voiture (allemande) haut de gamme équipée de cinq Electronic Central Units (ECU) et d'un bus CAN fonctionnant à 500 kb/s sortit des chaînes de production.
Ce fut alors l'arrivée de nombreux bus de même type, soit aux USA, soit au japon, soit en France (bus VAN - supporté par un GIE composé principalement de PSA et Renault).
À partir de 1994, le constructeur Citroën commercialise des véhicules multiplexés (XM) comportant 24 nœuds et mettant en œuvre le protocole VAN.
QUELQUES DATES SUR LES VÉHICULES MULTIPLEXÉS
|
1980 |
Naissance du CAN (Robert Bosch Gmbh). |
|
1985 |
Naissance du VAN. |
|
1986 |
Sortie de la BMW 850 CSI (le réseau multiplexé permet aux deux calculateurs des deux moteurs 6 cylindres en ligne reliés mécaniquement de communiquer). |
|
1989 |
Mercedes ( apparition du multiplexage sur la SL 500). |
|
1991 |
CAN Low Speed devient norme ISO 1519-2 standard. |
|
1992 |
Mercedes utilise le multiplexage CAN sur une classe S. |
|
1993 |
CAN High Speed devient norme ISO 11898 (CAN 2.0). |
|
1994 |
Fabrication en série limitée véhicules (Citroën XM), l'Audi A4 sort avec la gestion moteur multiplexée. |
|
1995 |
C'est le tour du Ford Galaxy d'avoir un réseau. |
|
1997 |
Sur la Volkswagen Passat, le confort du véhicule est multiplexé. |
|
1998 |
Fabrication en série sur la Peugeot 206. |
|
1999 |
Fabrication en série sur la Peugeot 406 et la Citroën Xsara Picasso. |
|
2001 |
Sortie de la Renault Laguna II avec un réseau multiplexé véhicule qui relie douze calculateurs, deux réseaux privatifs (un pour le contrôle de trajectoire, un autre pour la fonction lève-vitre impulsionnel avec siège mémorisé), un réseau multimédia. |
|
2002 |
Aujourd'hui, quelques véhicules comme l'Audi A8 ou la Mercedes Classe E sont totalement multiplexés. Leurs réseaux relient entre eux une trentaine de calculateurs avec de la fibre optique. |
POURQUOI LE MULTIPLEXAGE ?
Les normes antipollution, la sécurité ainsi que le confort des utilisateurs entraînent une augmentation constante des fonctions électroniques présentes dans nos véhicules : climatisation, navigation, ABS, radar, EOBD1… Ainsi que bon nombre d’informations qui peuvent être utilisées par les systèmes.
1 EOBD : European On Board Diagnostic.
|
Points communs entre les capteurs et les calculateurs |
|

Un véhicule haut de gamme nécessite environ 40 kg de faisceau pour une longueur de plus de deux kilomètres et 1 800 interconnections.
Ceci génère :
1. Une évolution majeure du câblage :
� complexité des faisceaux;
� augmentation en masse et en volume de ces faisceaux;
� augmentation du nombre d'interconnections.
2. Des problèmes de :
� conception et fabrication;
� coût et encombrement;
� fiabilité;
� recherche de pannes et diagnostics.
INTÉRÊT DU MULTIPLEXAGE
Le multiplexage permet la mise en commun et l’échange d’informations entre les systèmes.

|
Circuit bleu |
: CAN (moteur, transmission, suspension et direction) |
Mise en commun de l’information
Système classique

Système multiplexé

Réduction du nombre de fils
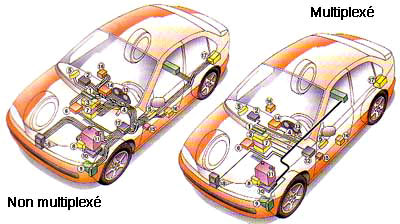
Système classique

Système multiplexé
DÉVELOPPEMENT DE L’ÉLECTRONIQUE
Un circuit électronique dispose, comme pour un relais, d’un circuit de commande et de puissance.
Le développement de l’électronique a permis :
� l’interrogation du système par des outils de diagnostic (paramètres entrées/sorties, activation sortie, lecture/effacement des défauts…);
� la possibilité d’activer/désactiver des fonctions initialement prévues par le constructeur;
� d’effectuer un diagnostic à distance.

ÉVOLUTION DU CÂBLAGE

Le multiplexage consiste à faire circuler plusieurs informations entre divers équipements électriques avec le moins de fils possible. Ceci implique que les informations soient :
� numérisées (constituées de bits) ;
� rapides (62 000 bits/seconde) ;
� identifiées (trame : destinataire, information, commande) ;
� classées par priorité.

On appelle Bus le circuit électrique véhiculant les informations multiplexées. Sur la majorité des véhicules multiplexés, le bus est constitué de deux fils. Chaque fil porte une appellation différente suivant le type de multiplexage :
- DATA ou (data barre) : codage VAN1; DATA
- CAN H ou CAN L : codage CAN2.
1 VAN : Vehicule Area Network.
2 CAN : Controller Area Network.
Dans les deux cas, ces deux informations sont complémentaires : quand l’un est à un niveau haut, l’autre est à un niveau bas.Cette stratégie de câblage permet d’éliminer une partie des parasites (entrants et sortants de la paire).
|
|
|


SIGNAL ANALOGIQUE / NUMÉRIQUE
Un signal électrique peut être sous deux formes : analogique ou numérique.
Signal analogique
Un signal analogique est un signal dont l’amplitude évolue dans le temps. Il provient souvent d’un capteur, comme par exemple le potentiomètre papillon.
Le signal fourni par le potentiomètre est un signal analogique. On peut dire qu’il « ressemble » à ce qu’il mesure.

Signal numérique
Un signal numérique est un signal dont l’amplitude ne prend que deux valeurs : tension, pas tension.
Il représente souvent l’état électrique d’un interrupteur: fermé, ouvert.
|
|
|


SYSTÈME DÉCIMAL/BINAIRE
La numération binaire (base deux) a pour base le nombre deux. Elle n'a que deux chiffres, le zéro et l'unité.
La numération décimale (base dix) a pour base le nombre dix. Elle utilise dix chiffres, de zéro à neuf.
Quelle que soit la base utilisée, un nombre se compose d'un ou plusieurs chiffres. Chaque chiffre d'un nombre occupe un rang dans ce nombre (on appelle souvent ce rang le poids du chiffre). En base « dix », le rang = 0 « de poids faible » (celui qui se trouve à droite du nombre) est l'unité, le rang suivant représente les dizaines, le troisième les centaines, et ainsi de suite. Le chiffre ayant le poids « le plus fort » se trouve complètement à gauche du nombre.
La valeur du nombre est la somme des valeurs des différents chiffres affectés de leur poids.
Conversion binaire /décimale
(chiffre de rang 1 x basepoids) + (chiffre de rang 0 x basepoids)

LA CONVERSION ANALOGIQUE/NUMÉRIQUE
Influence des parasites
Pour transmettre une information électrique à distance sans être altérée (perte par conduction, parasite, effet magnétique…), cette information doit être numérisée. Car un signal numérisé est moins sensible aux perturbations tant que celles-ci ne dépassent pas un certain niveau.

Un parasite modifie principalement l’amplitude d’un signal. Dans le cas d’un signal analogique où chaque valeur de tension est interprétée par le calculateur comme un angle (potentiomètre), on voit ici que pour une même valeur de tension parasitée correspondent deux angles d’ouverture (perturbation).

Principe de numérisation du signal analogique : potentiomètre papillon
Un état électrique ne prenant que deux valeurs « 0 » ou « 1 » s’appelle un Bit (Binary digit). Pour numériser un signal analogique il faut le découper (échantillonnage) et pour toute valeur de tension correspondante, la coder en bits.

ORGANISATION D’UN RÉSEAU MULTIPLEXÉ
Un réseau multiplexé peut être organisé avec des dispositifs maîtres ou esclaves. Cela dépend s’ils peuvent prendre l’initiative d’une communication (maître) ou seulement répondre à un maître (esclave).
Réseaux maître-esclave/maître-maître (multimaître)
Ce réseau permet à un « maître » de piloter plusieurs « esclaves », chacun ayant une tâche précise à exécuter. Les maîtres pourront dialoguer entre eux et mettre en commun des informations (maître-maîtres).
Synoptique :

Les calculateurs échangeant régulièrement des informations entre eux sont connectés sur un bus.
Pour faciliter les échanges et ne pas surcharger le bus, un véhicule multiplexé peut disposer de plusieurs bus en fonction des équipements et accessoires.
NORMES CAN / VAN:
|
CAN : Controller Area Networks
~ Naissance en 1980. ~ Développé par R. Bosch. ~ Première application en 1982 sur Mercedes 500 SL. ~ Vitesse maximale de transmission : 1 Mbit/s. ~ Temps de réponse : 50 ms. |
VAN : Vehicule Area Networks
� Naissance en 1985/86. � Développé par PSA/Renault. � Première application en 1994 sur Citroën XM. ~ Vitesse maximale de transmission : 250 kbit/s. ~ Temps de réponse : 200 ms. |

� le bus utilisé en format VAN est constitué de deux fils.
Sur chacun de ces fils, le signal ne peut prendre que deux niveaux « 0 » ou « 1 », les signaux étant complémentaires l’un de l’autre.
Les valeurs de tension sont comprises entre 0,5 V et 4,5 V.

� le bus utilisé en format CAN est constitué de deux fils désignés par CAN-H (High : haut) et CAN-L (Low : bas) ; les signaux sont complémentaires l’un de l’autre mais les niveaux logiques « 0 » et « 1 » sont à des potentiels différents.
Les tensions sont comprises :
| ~ 2,5 < CAN-H < 3,5 V | ~ 1,5 < CAN-L < 2,5 V. |
 |
 |
CONSTITUTION D’UNE TRAME
Le
découpage des commandes électriques crée des segments d'informations,
appelés " trame ". La trame permet de définir l'appartenance de la
commande (ex. : à quel feu arrière appartient cette commande) et bien
sûr son contenu (l'ampoule doit-elle être éteinte ou allumée).
La trame est en fait divisée en plusieurs parties (de 6 à 29 suivant les
protocoles) : un signal de préambule, le signal du début de la commande,
son appartenance, réception ou envoi, le contenu de la commande, le
contrôle d'erreur, le signal de la fin de la commande et un espace.
Pour les spécialistes, voici quelques appellations de segments de trame
couramment utilisées :
Start Of Frame (SOF),
Remote Transmission
Request (RTR), IDentifier Extension
(IDE), Data Length Code (DLC),
Cyclic Redundant
Check (CRC), ACKnowledge (ACK),
End Of Frame (EOF)"
et Intermission Frame
Space (IFS).
Il faut noter que, très souvent, les constructeurs ne codent pas un fil,
mais deux, pour augmenter la fiabilité. Le deuxième fil reçoit des
informations inversées par rapport au premier.
Le boîtier électronique, qui reçoit les informations, vérifie que les
deux fils donnent des informations inversées. Si cela n'est pas le cas,
l'information de la trame est rejetée.
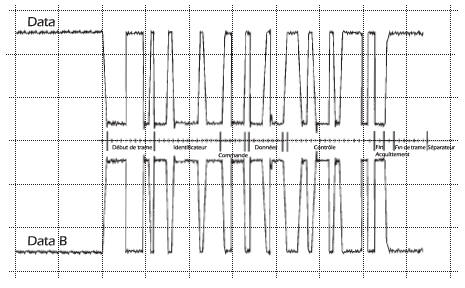
Sur les réseaux VAN et CAN, les signaux sont transmis sous forme de trame.

1. Début de trame : signale aux différents équipements qu’une trame va être émise.
2. Identificateur : désigne le/les émetteur(s) de la trame et indique les priorités.
3. 3. Commande : indique la nature du message (transmission d’une information, d’un ordre ou d’une commande).
4. Données : fournit le contenu du ou des messages (valeurs, consignes).
5. 5. Contrôle : permet de vérifier que les données transmises ou reçues sont correctes. Le récepteur effectue un calcul (algorithme) avec les données, le résultat est comparé avec le contrôle.
6. Acquittement : indique la bonne réception des données (message envoyé par le récepteur).
7. 7. Fin de trame : signale aux différents équipements que la trame est terminée (une nouvelle trame peut être émise).
LES DIFFÉRENTES TRAMES
Sur les réseaux CAN ou VAN, les trames sont envoyées à des moments précis selon les besoins de fonctionnement des systèmes.
On distingue différents types de trames, dont voici les principales :
~ Trame périodique : elle est envoyée périodiquement sur le réseau par les boîtiers (intervalles réguliers). Ex : pour PSA, toutes les 50 ms, le BSI transmet sur le champ de données les valeurs suivantes : régime moteur, vitesse véhicule, distance parcourue.
~ Trame évènementielle : elle est envoyée chaque fois que surgit un événement. Ex : demande de mise en route de l’autoradio, de la climatisation, etc.
OSCILLOGRAMMES
Trace à l’oscilloscope de la trame VAN
Trace à l’oscilloscope de la trame CAN

LA GESTION DES PRIORITES
Certaines commandes demandent des vitesses de communications plus
élevées que d'autres. Il est facile de comprendre que la commande du
changement d'une vitesse de la transmission automatique est prioritaire
sur celle qui demande une augmentation du volume de la radio.
Les vitesses de transmission, de même que les priorités, ont été
classées en 4 catégories :
Classe A
La classe A est la catégorie de faible débit (inférieur à 10 K bits par
seconde). Elle est utilisée pour les équipements de confort tels que la
radio, l'ordinateur de bord, les sièges électriques ou la fermeture
centralisée.
Classe B
La classe B regroupe les communications de débits entre 10 et 125 K bits
par seconde.
Exemples d'utilisation : vitesse du véhicule ou information du tableau
de bord.
Les commandes de classe B sont prioritaires sur celles de la classe A.
Classe C
La classe C, la plus utilisée, est la catégorie du haut débit, entre 125
et 1 million bits/s, soit relativement au temps réel. Elle est utilisée
pour les fonctions de sécurité telles que l'ABS
ou le freinage électronique, et pour les fonctions de gestion du moteur
et de la transmission.
Les commandes de classe C sont prioritaires sur les précédentes.
Classe D
Cette catégorie à très haute vitesse est récente.
Elle impose l'utilisation de fibres optiques à la place des
traditionnels fils en cuivre et le débit atteint 25 Mbits/s (25 000 K
bits/s).
La Classe D est utilisée pour les équipements de navigation GPS par
satellite et les fonctions de sécurité et de gestion du moteur et de la
transmission de la classe C.
DIALOGUE SUR LE RÉSEAU POUR LA FONCTION RÉFRIGÉRATION SIMPLE
Synoptique:

| Phases |
1. Demande de réfrigération au BSH (Boîtier Servitude Habitacle) par le bouton. |
|
2. Le BSH demande au calculateur d’injection l’autorisation d’enclencher le compresseur, qui dépendra de : � la vitesse de rotation du moteur < 6 250 tr/min; � l’information température d’eau moteur ; � l’information pression circuit réfrigération (> 3 bars et < 27 bars). |
|
|
3. Le calculateur d’injection donnera une réponse positive en prenant en compte le rapport de boîte automatique (estompage de couple). |
|
|
4. Le BSH mesure la température fournie par la sonde de l’évaporateur (non givré). |
|
|
5. Le BSH enclenche alors : - le compresseur ; � - l’allumage du voyant dans le bouton et signale au calculateur d’injection la mise en action du compresseur. |
|
|
6. Le calculateur d’injection commande alors le motoventilateur. |
LE BUS LIN
Le Bus LIN, Local Interconnect Network, a été créé par un consortium de constructeurs automobiles dont Audi, BMW, Daimler Chrysler, Volkswagen, Volvo et des fabricants de semi-conducteurs afin de générer un réseau secondaire de classe A à coût réduit fonctionnant avec le Bus CAN.
Le Bus LIN est basé sur une interface UART/SCI commun qui est standard pour la plupart des microcontrôleurs.
Il est spécifiquement utilisé pour les applications telles que les miroirs électriques, les sièges électriques, la fermeture centralisée, les lève-vitres avec ou sans fonction anti-pincement.

LE BUS MOST
Plusieurs protocoles se sont développés pour adapter la technologie du multiplexage à la diffusion de systèmes multimédia. Le Bus MOST (Media Oriented Systems Transport) semble prendre l'ascendant sur ses rivaux. Ce bus prend en charge les systèmes audio, vidéo et GPS. Il est basé sur la technologie CAN.
La technologie du bus MOST fut à l'origine créée par Oasis Silicon Systems AG en coopération avec BMW, Becker Radio et DaimlerChrysler pour des applications multimédia dans l'automobile. Créé en 1997, le concept pour le développement du MOST était à l'origine une coopération informelle. Puis en 1998 la coopération fut affirmée avec 17 constructeurs automobiles et plus de 50 fournisseurs qui adoptent la technologie MOST.
Il est destiné à remplacer les imposants et onéreux câblages qui ont été utilisés en automobile pour satisfaire aux besoins de connectivité multimédia. A base de fibre optique plastique, les réseaux MOST n'offrent pas seulement des performances accrues mais sont aussi plus solides pour un coût moindre ! Parmi les applications envisagées du MOST on peut citer les projets de "TV over MOST" (télévision embarquée).
Le but du réseau MOST est de fournir à faibles frais une interface réseau capable de connecter même le plus simple des périphériques. Il supporte des appareils avec une faible "intelligence" et sans capacité de mise en mémoire tampon comme les convertisseurs Digitaux/Analogiques pour les haut parleurs mais aussi d'autres plus complexes comme les appareils DSP et leurs besoins pour des mecanismes de contrôle sophistiqués et leurs possibilités multimédia. Le MOST apporte donc une flexibilité générale maximum.
MOST est un réseau point par point en "peer to peer" (à base d'échange et de partage) qui peut être implanté sur une topologie de réseau en boucle, en étoile ou en chaînage. Les périphériques partagent différents canaux pour des transmissions de données synchrones ou asynchrones. MOST peut faire fonctionner le réseau de façon centralisée ou décentralisée : dans le premier cas un noeud central est le gestionnaire ; dans le second cas, MOST n'a besoin d'aucune gestion.
D'autres protocoles secondaires sont aussi développés pour des
applications très spécifiques.
TRANSMISSION DE DONNÉES PAR FIBRE OPTIQUE
Le spectre lumineux
La lumière « visible » s’étend de l’infrarouge à l’ultraviolet, bornes non comprises.
1 nanomètre = 10-9 mètre = 1/1 000 000 de millimètre, soit en fréquence la lumière s’étendant de 4 x 1014 à 8 x 1014 Hz (400 000 à 800 000 GHz).
Vitesse et propagation
La lumière se propage à 300 000 km/s dans un milieu homogène et isotrope.
Que fait la lumière lorsqu’elle rencontre un obstacle ?
Un rayon de lumière qui vient de l’air vers une plaque de verre selon un angle d’incidence donné va :
� se réfléchir et retourner dans l’air, c’est le rayon réfléchi;
� pénétrer dans le verre en subissant une déviation de trajectoire, c’est le rayon réfracté;
� perdre un peu d’énergie.
Le rapport entre l’énergie réfléchie et l’énergie transmise varie en fonction de l’angle d’incidence. Il existe un angle critique.
S’il est mesuré comme indiqué sur le schéma, lorsque cet angle devient inférieur à l’angle critique, il n’y a plus de rayon réfracté et aux pertes par absorption près, la totalité du rayon incident est réfléchie.

La fibre optique

Constitution
|
Une fibre optique est constituée de : ~ un cœur; ~ une gaine optique; ~ un revêtement. |
|

Propagation de la lumière dans la fibre optique

En regardant le schéma ci-dessus, on comprend bien que plus le diamètre du cœur de la fibre sera petit, plus on minimisera les risques d’un angle d’incidence trop grand.
La fibre à gradient d’indice
Ici, deux améliorations sont apportées :
� le diamètre du cœur est plus petit;
� le cœur est constitué de deux couches successives, à indice de réfraction de plus en plus grand. Ainsi, un rayon lumineux qui ne suit pas l’axe central de la fibre est ramené « en douceur » dans le droit chemin.
La source lumineuse
L’émetteur est le plus souvent une diode électroluminescente ou une diode laser.
Le récepteur est une photodiode (diode sensible à la lumière) ou un phototransistor.
L’émetteur convertit les impulsions électriques en signaux optiques (5 nanosecondes); le récepteur convertit les signaux optiques en impulsions électriques (5 nanosecondes).
La fibre optique coûte-t-elle cher ?
Non. Par rapport au câble en cuivre, elle aurait même tendance à coûter beaucoup moins cher. En revanche, la connectique et les convertisseurs d’énergie électrique/lumineuse à placer aux extrémités sont très coûteux en fonction des technologies mises en œuvre.
Quels sont les principaux avantages de la fibre optique ?
1. La fibre optique est totalement insensible aux rayonnements électromagnétiques.
2. L’atténuation du signal est inférieure à celle d’un conducteur électrique et les distances couvertes sans nécessité d’installer des amplificateurs sont bien plus grandes.
3. La bande passante est généralement bien supérieure à celle que l’on peut obtenir avec un câble électrique.
4. Les performances atteintes sont de plusieurs centaines de mégabits par seconde.
La fibre optique est-elle fragile ?
Pas particulièrement, c’est la connectique qui peut l’être. La seule difficulté est le rayon de courbure minimum qui la rend assez peu souple d’emploi pour les installations « volantes ».
L'AVENIR
Le multiplexage a permis une réduction considérable du nombre de fils et
de connexions. Mais la demande en systèmes électroniques est telle que
le véhicule est peu à peu envahi par les calculateurs électroniques. En
restant dans une gamme de véhicule courante, la Peugeot 607 peut
héberger jusqu'à 21 calculateurs et la Peugeot 807, 29 calculateurs !
Demain, la puissance électrique de 42 volts et la technologie X-by-wire
qui piloteront les équipements de freinage, suspension et direction
feront que les véhicules seront gérés par plusieurs centaines de
mini-calculateurs électroniques.

CONCLUSION
Le multiplexage est présenté comme une révolution technologique majeure dans l'automobile parce qu'il permet aux constructeurs d'équiper de façon fiable les véhicules d'un grand nombre d'options... Cela est vrai, mais cette évolution n'a pas été faite pour seulement satisfaire le client, mais aussi pour des questions de coût : en effet, à équipements équivalents, la fabrication d'un véhicule multiplexé revient moins cher qu'une automobile non multiplexée. La fabrication en série des calculateurs électroniques (réalisée par des équipementiers à l'étranger) est bien meilleur marché que la pose d'une quantité plus importante de fils à base de cuivre dont le prix ne cesse d'augmenter.
D'autre part, la gestion à base de calculateurs et de logiciels permet d'adapter facilement les véhicules au marché sans avoir à refaire de coûteux développements ; de même, une mise à jour logicielle (souvent opérée par les constructeurs sur les véhicules à problèmes) permet de ne plus déclarer certaines fautes en changeant tout simplement les critères de déclenchement et ainsi d'augmenter la fiabilité à moindre coût ... Simple comme un clic de souris !
RECOMMANDATIONS
~ L’emploi de lampe témoin, led ou voltmètre analogique pour contrôler une liaison multiplexée est à proscrire (générateur de défauts par consommation de courant).
~ Les liaisons multiplexées peuvent être réparées avec des manchons « Raychem ».
~ Respecter en cas de réparation la structure du faisceau (torsadé, passage d’origine…) pour conserver « l’immunité au parasite ».
~ Le multiplexage permet de relier des calculateurs (réseau de calculateur); il faut respecter des règles avant de débrancher un calculateur ou une batterie car les communications vont être interrompues (« défaut de communication »).
~ Les interventions doivent s’effectuer suivant les recommandations constructeurs (pose, dépose, paramétrage, apprentissage, réinitialisation, …).
©2006 EOBD SCAN